



屏蔽类电源滤波器


时间: 2024-07-09 05:19:43 | 作者: 屏蔽类电源滤波器
智能功率器件 (IPD)在车身负载驱动的大规模应用。对于感量较大的负载,如雨刮、鼓风机、风扇、继电器等,需要仔细考虑负载关断时产生的能量对系统的冲击,同时驱动器件不能被该能量击穿。本文提供了评估测量感性能量的方法和工具,在一个明确定义的应用场景中,瞬间关断时的产生的箝位能量(ECL),与高压侧器件本身的能量能力作对比,保证IPD器件长期可靠工作。
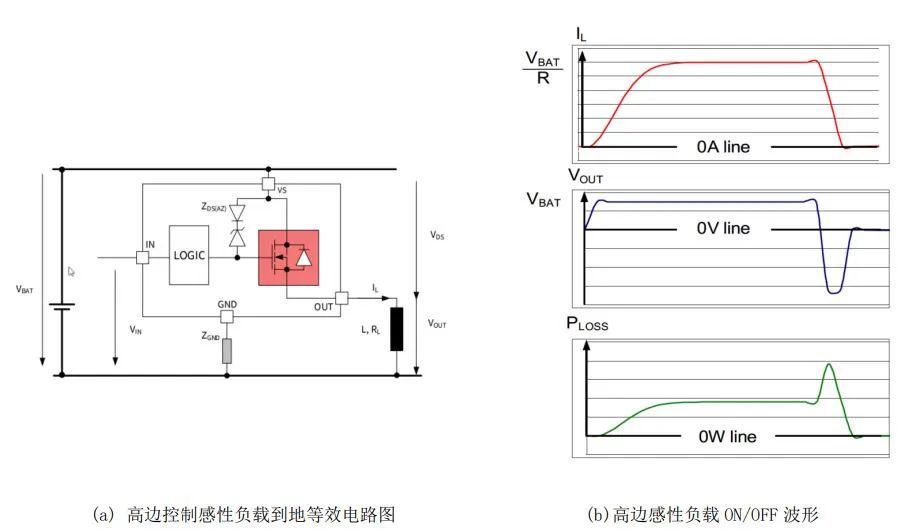
汽车应用越来越需要具备驱动大电流、大感量执行器的能力,在变速箱控制模块(TCU)应用中,常用的执行器如电机、电磁阀(净化、进气)等;在车身控制模块(BCM)中,常用的执行器如雨刮、继电器或风机、水泵、油泵也同样表现为感性特点。驱动这些负载最简单和最常见的方法是将它们连接到高边侧开关的输出,如图1所示(器件集成的诊断和保护功能未在框图内显示)。
在开关的导通阶段给感性元件充电时,存储的能量与负载电流(IL)和电感(L)有关,如下所示:
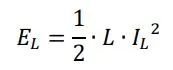
在开关断开之后,负载电流将降至零,之前存储的能量加上VBAT产生的能量将同时耗散:能量较小时,将通过热的形式消耗到负载本身(RL);当能量较大时,大部分能量将被IPD内置钳位二极管吸收,从而保护IPD芯片与负载。通常,工程上可以实施不相同的技术以减少这种施加到IPD内部的耗散能量,如利用续流二极管或RC并联支路等。但是,以上方法除了增加成本与系统复杂程度之外,还会延长执行器的关闭时间(tF)。
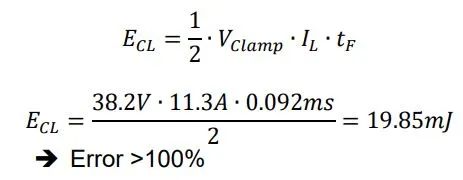
在某些应用场合下,例如:喷油器驱动、PWM控制阀等,对关闭时间有严格的要求。因此,IPD所具备主动钳位的功能,使其成为一个非常完美的解决方案。通常,IPD所具备的箝位电压(VCL)越高,其关闭时间tF将越短。并且,能量在箝位期间耗散到IPD内置TVS中,称之为箝位能量(ECL),对于大功率应用场景中,通常都具备更多能量冲击,会在器件硅中产生重复的热应力,进而影响器件寿命以及其它功能等。
评估实际负载特性并获得高边开关中耗散的箝位能量值的最佳方法是通过实际测量得到。当然,除了保证测量仪器的精准,尽可能多地再现执行器的操作条件是很重要的,这样更能贴近实际应用中情况。如图2所示,钳位能量的测试,建议将负载保持在试验箱内预期的工作时候的温度下进行测量。
其中VD和IL分别是开关电压和负载电流,tF是负载电流关闭后归零需要的时间。

现在我们的角度来看一个真实的例子:利用时下常见的数字示波器的数学函数,很容易得到被测VD、IL及其积分的乘积,如图3所示。
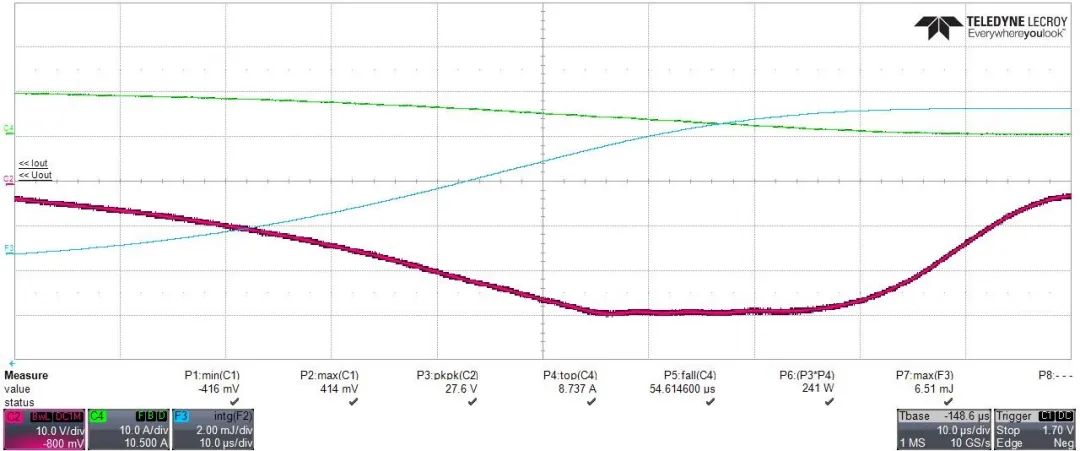
备注2 绿色C4为电流关断波形,紫色C2为out引脚负压波形,蓝色F2为C2*C4在关断时间内的积分。
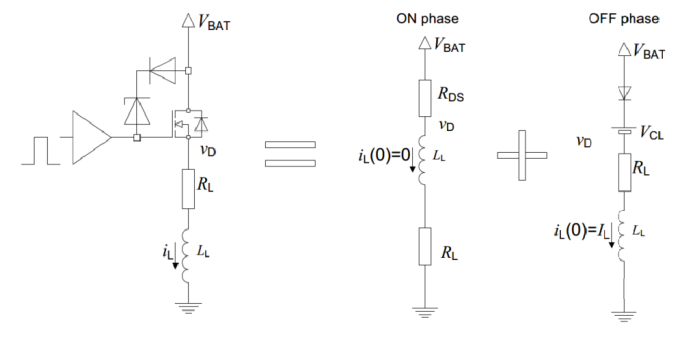
将IPD内部集成主要元器件分离,考虑ON与OFF时两种状态,其等效电路如图4所示。
ILIM是IPD器件本身的限制电流,tON是执行器的开启维持的时间。等式(4)除了包括开关电流保护的可能干预之外,我们还考虑了这样一个事实,即短时间接通不会给负载足够的时间来达到其状态电流。

对一阶线性齐次微分方程求通解,电感电流按指数规律衰减,衰减的快慢取决于电感自身机电常数τ。VBAT-VClamp=0,待求解微分方程如下:
器件的钳位电压VCL,电流动态实时值,以及电流的归零时间已经精确求得,这样我们就可以求解能量ECL,也就是对功率进行积分,其中钳位电压是固定的(器件集成的钳位管决定的),电流呈现指数衰减(感性负载特性),off 阶段的维持的时间tF也已确定),这样一个时间段求解积分方程即可得出理论上的能量值。
正常情况下,基于公式(9),能够获得感性负载关断时的钳位能量,并基于此量化数据去评估并选择正真适合的高边智能开关。
鉴于感性负载的机电参数与温度息息相关,也即任何金属的导电性通常都会受到温度的影响,由此产生R和T之间的关系。如下式:
![]()
式中,α是材料之间变化的系数,对于铜,αcu=0.0039 K-1。对于典型的汽车温度应用场景范围[-50°C,150°C],结合以上公式,在全温度范围必然会产生不同的电阻值。在实际评估过程中,考虑温度影响会更加合理和准确。
构成线圈磁芯的铁磁性材料表现出对磁场的依赖性。因此,线圈的电感量与流过线圈的电流有依赖关系。一般来说,在一定的电流水平,即饱和电流下,电感也随着温度的升高而减小。此外,我们应该考虑的是,许多执行器(如继电器)由于机械故障而改变其核心的形态开关,即改变磁芯的磁导率(μ),由此产生电感。不幸的是,执行机构的失效或异常行为不能轻易排除。由于这个原因,电感对电流的依赖性很难包含在方程式中。重要的是要知道,负载的实际钳位能量将受到这种效应的严重影响。
本文描述了英飞凌智能高边开关关断感性器件时发生的钳位事件,阐述了钳位能量的测量方法,提出了钳位能量的计算公式。通过实测值与计算值的比较,指出了由于荷载的非理想性而引起的偏差。这是一种实用的方法,根据感性电感、电阻参数以及温度、供电电压等参数,在实际应用过程中,能结合公式(9)去准确计算钳位能量,从而去最优化的选择英飞凌IPD器件来稳定驱动对应负载,保证系统的长期可靠性。
本文由英飞凌任宝栋,与联合电子汽车洪 炜、薛洋、张久庆联合撰写,并发表于《汽车实用技术》2022年第十一期。




